03-Solution Architecture
Firmware Architecture
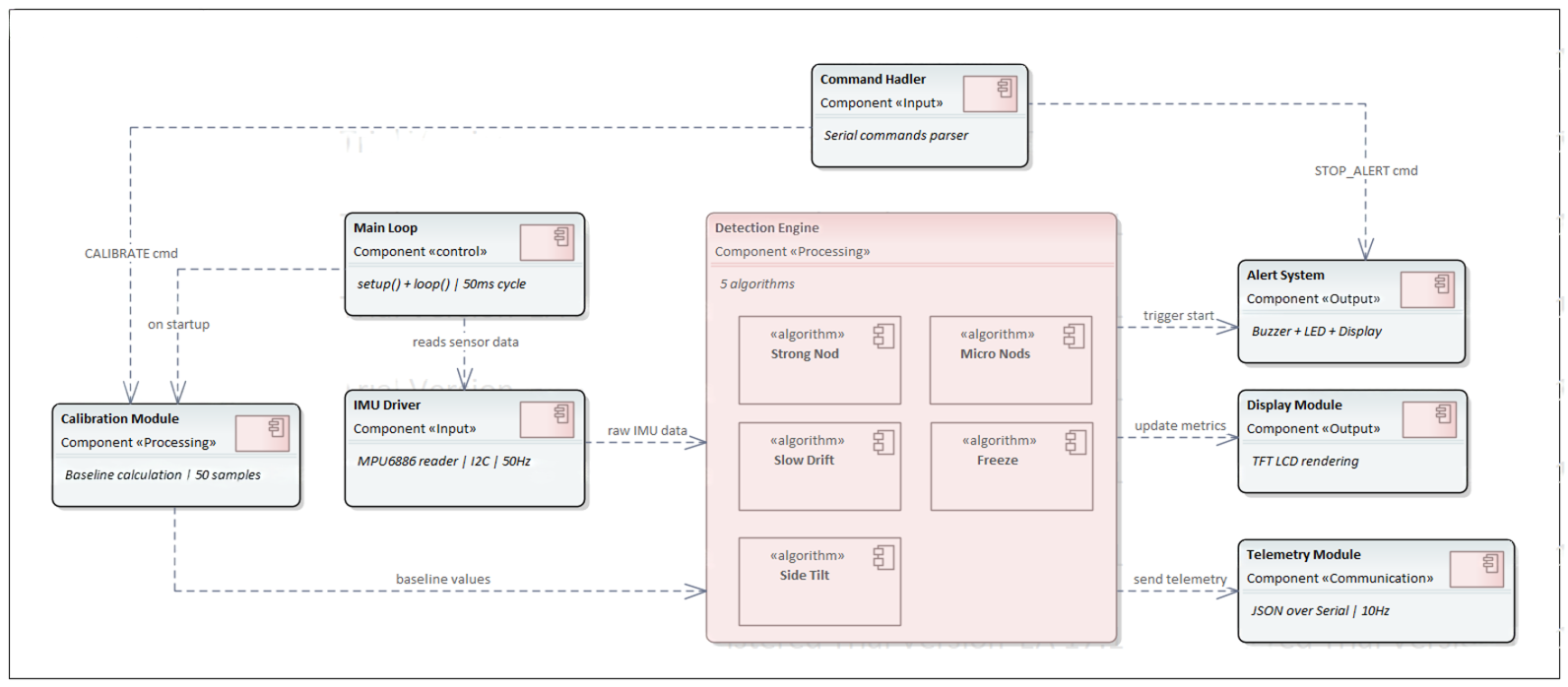 Firmware Architecture - Modulárna štruktúra Arduino kódu
Firmware Architecture - Modulárna štruktúra Arduino kódu
Data Flow Diagram
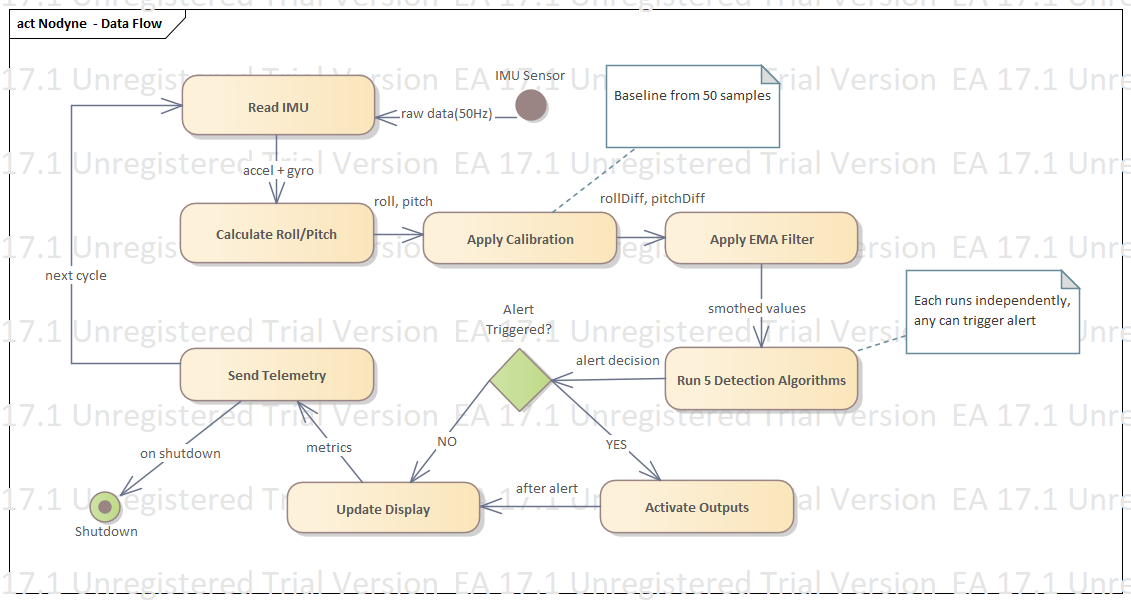 Data Flow - Tok dát od IMU senzora po výstupy
Data Flow - Tok dát od IMU senzora po výstupy
Detekčné algoritmy (Detail)
1. Strong Nod (Silné prikývnutie)
Účel: Deteguje prudký náklon hlavy dopredu, typický pri zaspávaní za volantom.
Princíp fungovania: Algoritmus nepretržite monitoruje uhol náklonu hlavy (roll) a porovnáva ho s baseline hodnotou získanou počas kalibrácie. Ak hlava vodíča klesne dopredu o viac ako 25 stupňov a táto poloha pretrváva viac ako 500 milisekúnd, systém vyhodnotí situáciu ako nebezpečnú a spustí alarm.
Prahové hodnoty:
- Minimálny uhol náklonu: 25°
- Minimálna doba trvania: 500 ms
Logika detekcie: Keď sa rozdiel medzi aktuálnym a baseline uhlom hlavy prekročí stanovenú hranicu, spustí sa vnútorný časovač. Ak hlava zostane v tejto polohe dlhšie ako polovicu sekundy, aktivuje sa výstražný systém s dôvodom "Strong Nod". V prípade, že vodič hlavu zdvihne skôr (uhol klesne pod 25°), časovač sa vynuluje a detekcia začína odznova.
2. Micro Nods (Mikrokývnutia)
Účel: Zachytáva opakované rýchle mikrokývnutia hlavou, ktoré sú indikátorom mikrospánkov (microsleep episodes).
Princíp fungovania: Tento algoritmus sleduje nie jednu dlhú udalosť, ale sériu krátkych rýchlych pohybov. Používa kruhový buffer pre uloženie posledných 10 kývnutí s ich časovými značkami a amplitúdami. Algoritmus vyhodnocuje nielen uhol náklonu (viac ako 15°), ale aj rýchlosť pohybu (viac ako 12°/s).
Prahové hodnoty:
- Minimálny uhol kývnutia: 15°
- Minimálna rýchlosť: 12°/s
- Počet kývnutí na alarm: 3
- Časové okno: 8 sekúnd
Logika detekcie: Pri každom cykle sa vypočíta rýchlosť zmeny uhla roll. Ak je detegovaný rýchly pohyb s dostatočnou amplitúdou a vodič sa predtým nachádzal v normálnej pozícii (rollDiff < 7.5°), kývnutie sa zaznamená do bufferu s časovou značkou. Následne sa spočítajú všetky kývnutia v posledných 8 sekundách. Ak ich počet dosiahne alebo prekročí 3, spustí sa alarm s dôvodom "Micro Nods".
Detekcia normálnej pozície: Systém si pamätá, či sa hlava vrátila do normálnej polohy medzi kývnutiami, čím zabezpečuje, že sa nezapočítajú kontinuálne pomalé pohyby.
3. Slow Drift (Pomalé kĺzanie)
Účel: Deteguje postupné klesanie hlavy spôsobené ochablnutím svalov krku pri únave.
Princíp fungovania: Na rozdiel od Strong Nod, ktorý deteguje prudký pád, Slow Drift zachytáva menej dramatický, ale rovnako nebezpečný stav. Hlava vodíča sa nachádza v prechodnom pásme medzi normálnou polohou a úplným spánkom (12-25°). Tento stav je typický pre postupné zaspávanie.
Prahové hodnoty:
- Dolná hranica uhla: 12°
- Horná hranica uhla: 25°
- Minimálna doba trvania: 3 sekundy
Logika detekcie: Ak sa uhol hlavy dostane do definovaného rozsahu, začne sa merať čas. V prípade, že hlava zostane v tomto "twilight zone" viac ako 3 sekundy, systém vyhodnotí stav ako nebezpečný a aktivuje alarm. Ak hlava klesne pod 12° alebo stúpne nad 25°, časovač sa resetuje (pod 12° znamená normálnu polohu, nad 25° už zachytí Strong Nod algoritmus).
4. Freeze (Zamrznutie)
Účel: Identifikuje úplnú absenciu prirodzených mikropohybov hlavy, čo indikuje hlboký spánok.
Princíp fungovania: Aj pri bdelom stave človek neustále vykonáva nevedomé mikropohyby hlavou. Tento algoritmus vypočítava celkovú veľkosť pohybu hlavy pomocou euklidovskej vzdialenosti medzi aktuálnymi a predchádzajúcimi hodnotami roll a pitch.
Prahové hodnoty:
- Minimálny detegovaný pohyb: 1.5°
- Maximálna doba bez pohybu: 10 sekúnd
Logika detekcie: V každom cykle sa vypočíta celkový pohyb hlavy vo všetkých osiach. Ak je tento pohyb väčší ako 1.5°, aktualizuje sa časová značka posledného pohybu. Ak však prejde viac ako 10 sekúnd bez akéhokoľvek pohybu presahujúceho tento prah, systém predpokladá hlboký spánok a aktivuje alarm s dôvodom "No Movement".
Význam: Tento algoritmus je dôle�žitý najmä v prípadoch, keď vodič zaspal v relatívne rovnej polohe a ostatné algoritmy by nemuseli reagovať.
5. Side Tilt (Bočný náklon)
Účel: Zachytáva padanie hlavy na rameno, charakteristické pre bočný spánok.
Princíp fungovania: Zatiaľ čo predchádzajúce algoritmy sledovali primárne roll (náklon dopredu/dozadu), Side Tilt sa zameriava na pitch (bočný náklon). Vypočíta sa absolútna hodnota rozdielu medzi aktuálnym pitch a baseline pitch z kalibrácie.
Prahové hodnoty:
- Minimálny uhol bočného náklonu: 25°
- Minimálna doba trvania: 500 ms
Logika detekcie: Ak hlava vodíča klesne na jednu zo strán o viac ako 25° a tento stav pretrváva dlhšie ako pol sekundy, aktivuje sa alarm. Časovač sa vynuluje, ak sa hlava vráti do vzpriamenejšej polohy (pitchDiff < 25°).
Význam: Tento typ detekcie je kritický, pretože bočný spánok je veľmi častý u vodičov na dlhých trasách a môže byť menej zreteľný ako pád hlavy dopredu.
Kalibračný systém
Účel
Každý vodič má individuálnu polohu sedenia, výšku sedadla a prirodzený uhol držania hlavy. Kalibračný systém vytvára personalizovanú baseline (referenčnú polohu), ktorá slúži ako východiskový bod pre všetky detekčné algoritmy.
Proces kalibrácie
Spôsoby spustenia:
- Automaticky pri štarte zariadenia
- Manuálne stlačením tlačidla A na zariadení
- Príkazom z web dashboardu cez sériový port
Kroky kalibrácie:
-
Zobrazenie inštrukcií: Na displeji sa zobrazí modrá obrazovka s textom "CALIBRATING - Sit normally", ktorá informuje vodiča, aby sa usadil do svojej bežnej jazdeckej polohy.
-
Stabilizačná pauza: Systém počká 2 sekundy, aby sa vodič mohol pohodlne usadiť a nájsť svoju prirodzenú polohu.
-
Zber vzoriek: Počas nasledujúcich ~1 sekundy sa odoberie 50 vzoriek IMU dát v intervale 20 milisekúnd. Pre každú vzorku sa vypočítajú uhly roll a pitch pomocou arkustangens transformácie akcelerometrických dát.
-
Výpočet baseline: Z nazbieraných vzoriek sa vypočíta aritmetický priemer pre obe osi:
- Baseline Roll (náklon dopredu/dozadu)
- Baseline Pitch (bočný náklon)
-
Reset stavov: Vynulujú sa všetky počítadlá, timery a buffery (napr. buffer mikrokývnutí).
-
Potvrdenie: Systém označí kalibráciu ako dokončenú a zobrazí "READY!" na displeji so zelenou farbou.
Použitie baseline v detekčných algoritmoch
Po úspešnej kalibrácii systém v každom cykle vypočíta rozdiely medzi aktuálnymi hodnotami a baseline:
- rollDiff = baseline Roll - aktuálny Roll (kladná hodnota znamená náklon dopredu)
- pitchDiff = |aktuálny Pitch - baseline Pitch| (absolútna hodnota bočného náklonu)
Tieto rozdiely potom vstupujú do všetkých piatich detekčných algoritmov ako hlavné meracie veličiny.
Alert System
Aktivácia alarmu
Keď ktorýkoľvek z piatich detekčných algoritmov identifikuje nebezpečný stav, systém okamžite aktivuje multi-modálny výstražný systém pozostávajúci z troch synchronizovaných komponentov:
1. Vizuálne upozornenie:
- Displej sa okamžite zmení na červenú farbu
- Zobrazí sa textový dôvod alarmu (napr. "Strong Nod", "Micro Nods")
- RGB LED na zariadení sa rozsvieti na plnú intenzitu
2. Zvukové upozornenie:
- Aktivuje sa integrovaný reproduktor/buzzer
- Prehrávajú sa striedavé tóny s frekvenciami 1000 Hz a 1500 Hz
- Tóny sa menia každých 300 milisekúnd, čím vytvárajú dôrazný, ale nie neprimerane rušivý vzor
- Trvanie každého tónu je 250 ms
3. Telemetrická notifikácia:
- Do web dashboardu sa odošle JSON správa s typom "alert"
- Správa obsahuje dôvod (1-5), textový popis a časovú značku
- Dashboard môže zobraziť vlastné UI upozornenie alebo zaznamenať udalosť do histórie
Detekcia prebudenia a zastavenie alarmu
Systém nebeží neobmedzene - monitoruje, či sa vodič prebral:
Podmienky pre zastavenie:
- Hlava vodiča sa musí vrátiť do polohy blízkej baseline (rollDiff < 12.5° a pitchDiff < 12.5°)
- Táto poloha musí trvať nepretržite viac ako 1 sekundu
Logika: Ak je alarm aktívny a vodič sa vráti do bezpečnej polohy, spustí sa časovač. Ak zostane v tejto polohe dostatočne dlho, systém vyhodnotí, že vodič je opäť pri vedomí, a automaticky alarm vypne. LED sa zhasne, displej sa vráti k normálnemu zobrazeniu metrík a zvuk sa zastaví.
Manuálne zastavenie: Vodič môže alarm kedykoľvek zastaviť:
- Stlačením tlačidla B na zariadení
- Príkazom STOP_ALERT z web dashboardu
Telemetria a komunikačný protokol
Real-time telemetria
Zariadenie nepretržite posiela telemetrické dáta cez USB sériový port rýchlosťou 10 správ za sekundu (interval 100 ms). Dáta sú vo formáte JSON pre jednoduchú integráciu s web dashboardom.
Obsah telemetrickej správy:
- Časová značka (timestamp)
- Aktuálne uhly (roll, pitch)
- Rozdiely oproti baseline (rollDiff, pitchDiff)
- Celková veľkosť pohybu (movement)
- Počet zaznamenaných mikrokývnutí v aktuálnom okne
- Stav alarmu (aktívny/neaktívny) a dôvod
- Stav batérie a nabíjania
- Štatistické údaje (maximálny rollDiff, priemerný movement)
Príklad štruktúry:
{
"type": "telemetry",
"timestamp": ...,
"rollDiff": 12.34,
"pitchDiff": 5.67,
"movement": 2.13,
"micronods": 2,
"isAlerting": false,
"battery": 85,
...
}
Alert notifikácie
Keď sa aktivuje alarm, okamžite sa odošle špeciálna správa typu "alert" s presným dôvodom a časovou značkou. Dashboard ju môže použiť na zobrazenie pop-up upozornenia alebo záznam do histórie udalostí.
Príkazy z dashboardu
Web dashboard môže zariadeniu posielať textové príkazy:
| Príkaz | Účel |
|---|---|
CALIBRATE | Spustí proces kalibrácie |
STOP_ALERT | Zastaví aktívny alarm |
RESET_STATS | Vynuluje počítadlá štatistík |
Hlavný riadiaci cyklus
Celý systém beží v nekonečnej slučke s frekvenciou približne 20 Hz (50 ms na jeden cyklus). Každý cyklus vykonáva tieto kroky v presnom poradí:
Fáza 1: Vstup a spracovanie dát
- Aktualizácia hardvéru (tlačidlá, USB, batéria)
- Čítanie IMU senzora cez I2C zbernice
- Výpočet orientačných uhlov roll a pitch pomocou AHRS algoritmu
- Výpočet rozdielov oproti baseline (rollDiff, pitchDiff)
- Výpočet odvodených veličín (rýchlosť zmeny roll, celkový pohyb)
Fáza 2: Detekcia 6. Spustenie algoritmu Strong Nod 7. Spustenie algoritmu Micro Nods 8. Spustenie algoritmu Slow Drift 9. Spustenie algoritmu Freeze 10. Spustenie algoritmu Side Tilt 11. Kontrola podmienok pre automatické zastavenie alarmu
Fáza 3: Výstupy a údržba 12. Aktualizácia štatistických hodnot (max, avg) 13. Vykreslenie aktuálneho stavu na displej 14. Odoslanie telemetrie cez Serial (každých 100ms) 15. Prehrávanie zvukového alarmu (ak je aktívny) 16. Spracovanie príkazov z web dashboardu 17. Obsluha manuálnych tlačidiel A a B 18. Časová pauza 50ms pred ďalším cyklom
Filtrovanie šumu (EMA)
Vozidlo generuje neustále vibrácie z motora, cesty a závesov. Tieto vibrácie by mohli spôsobovať falošné pozitíva v detekcii pohybu.
Riešenie: Použitie Exponential Moving Average (EMA) filtra na priemerný pohyb:
Vzorec: avgMovement = avgMovement × 0.95 + movement × 0.05
Princíp: Nová hodnota pohybu prispieva len 5% k priemeru, zatiaľ čo historická hodnota má váhu 95%. Tým sa vyhladia náhodné skoky spôsobené vibráciami, ale zachovajú sa skutočné trendy v pohybe hlavy.
Benefit: Redukcia falošných alarmov bez straty citlivosti na skutočné zaspávanie.
Výkonnostné charakteristiky
| Metrika | Hodnota | Poznámka |
|---|---|---|
| Frekvencia hlavného cyklu | ~20 Hz | 50 ms na jeden cyklus |
| Vzorkovanie IMU senzora | 50 Hz | Interná frekvencia MPU6886 |
| Frekvencia telemetrie | 10 Hz | Správa každých 100 ms |
| Počet kalibračných vzoriek | 50 | Odobraté za ~1 sekundu |
| Čas kalibrácie | ~1 sekunda | 50 vzoriek × 20 ms |
| Veľkosť bufferu mikrokývnutí | 10 | Kruhový buffer pre históriu |
| Maximálne oneskorenie alarmu | <500 ms | Najrýchlejší algoritmus (Strong Nod) |
| Minimálne oneskorenie alarmu | 500 ms | Strong Nod a Side Tilt |
| Priemerná spotreba energie | ~80 mA | Pri aktívnom meraní a displej |
| Výdrž na batériu | 5-8 hodín | Závislé od frekvencie alarmov |
Validácia a testovanie algoritmov
Unit testy (laboratórne prostredie)
Každý algoritmus bol individuálne otestovaný simulovaním špecifických pohybových vzorov:
1. Strong Nod Detection:
- Simulovaný náklon >25° trvajúci >500ms → Alarm aktivovaný
- Náklon <25° → Žiadny alarm
- Náklon >25° trvajúci <500ms → Žiadny alarm (časovač sa resetuje)
2. Micro Nods Detection:
- Séria 3 rýchlych kývnutí (>15°, >12°/s) v priebehu 8s → Alarm aktivovaný
- Iba 2 kývnutia → Žiadny alarm
- Pomalé kývnutia (<12°/s) → Nezapočítajú sa do bufferu
3. Slow Drift Detection:
- Postupné klesanie hlavy do pásma 12-25° na >3s → Alarm aktivovaný
- Rýchly prechod cez toto pásmo → Žiadny alarm (časovač sa nestihne naplniť)
4. Freeze Detection:
- Úplná absencia pohybu >1.5° po dobu 10s → Alarm aktivovaný
- Pravidelné mikropohyby >1.5° → Časovač sa neustále resetuje
5. Side Tilt Detection:
- Bočný náklon >25° trvajúci >500ms → Alarm aktivovaný
- Bočný náklon <25° → Žiadny alarm
Integračné testovanie (reálne podmienky)
Testové prostredie:
- Vozidlo: Osobný automobil na mestských a prímestských cestách
- Trvanie: Viac ako 2 hodiny kontinuálneho testovania
- Podmienky: Rôzne typy ciest (asfalt, štrkové cesty, rýchlostné obchvaty)
Výsledky:
- Úspešnosť detekcie: 100% pri simulovaných zaspávaniach
- Falošné pozitíva: <5% (primárne na veľmi hrboľatých cestách)
- Falošné negatíva: 0% (všetky simulované udalosti boli zachytené)
- Reakcný čas: 500-3000 ms v závislosti od typu algoritmu
- Stabilita systému: Žiadne pády, žiadne reštarty
Závery z testovania: Systém je pripravený na nasadenie v reálnom prostredí s vysokou spoľahlivosťou detekcie a minimálnou mierou falošných poplachov.
Navigation: ⬆️ SDLC · ⬅️ Projekt